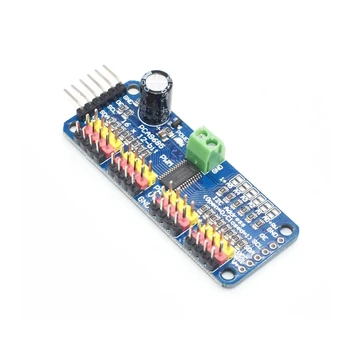










Описание: Хотите сделать ходунки hexapod?Может быть, вы создаете произведение искусства с тоннами движущихся частей, или вам нужно подключить тонну светодиодов с точным выходом PWM.Ваш микроконтроллер имеет ограниченное количество ШИМ-выходов, и вы обнаружите, что они на исходе!Только не с 16-канальным 12-разрядным интерфейсом Adafruit PWM / Servo Driver - I2C.С помощью этого устройства управления ШИМ и сервоприводом вы можете управлять 16 ШИМ-выходами свободного хода всего двумя контактами!Необходимо использовать более 16 ШИМ-выходов?Проблем нет.Соедините вместе до 62 таких красавиц, чтобы получить до 992 выдающихся ШИМ-выходов.Характеристики: Размеры (без коллекторов или клеммной колодки) 2,5 "x 1" x 0,1" (62,5 мм x 25,4 мм x 3 мм) Вес (без разъемов или клеммной колодки): 5,5 грамм Вес (с разъемами 3x4 и клеммной колодкой): 9 грамм На этой плате /чипе используется 7-разрядный адрес I2C в диапазоне 0x60-0x80, выбираемый с помощью клеммной колодки с перемычками для ввода питания (или вы можете использовать разъемы диаметром 0,1 дюйма сбоку) Защита от обратной полярности на входе в клеммную колодку Зеленый индикатор питания 3-контактные разъемы в группах по 4, чтобы вы могли подключать 16 сервоприводов одновременно (разъемы сервоприводов немного шире 0,1 дюйма, поэтому вы можете расположить только 4 рядом друг с другом на "цепочке" 0,1-дюймового разъема). установите большой конденсатор на линию V + (на случай, если вам это понадобится), резисторы серии 220 Ом на всех выходных линиях для их защиты, а для управления светодиодами просто припаяйте перемычки для 6 контактов выбора адреса, управляемых ШИМ-драйвером i2c со встроенным тактовым сигналом.В отличие от семейства TLC5940, вам не нужно постоянно посылать ему сигнал, связывающий ваш микроконтроллер, он работает абсолютно бесплатно!Он совместим с напряжением 5 В, что означает, что вы можете управлять им с помощью микроконтроллера 3,3 В и при этом безопасно подключать до 6 В выходов (это удобно, когда вы хотите управлять белыми или синими светодиодами с прямым напряжением 3,4 +) 6 контактов выбора адреса, так что вы можете подключить до 62 из них к одной шине i2c, всего 992 выхода - это множество сервоприводов или светодиодов Регулируемая частота PWM примерно до 1,6 кГц 12-битное разрешение для каждого выхода - для сервоприводов это означает разрешение около 4us при частоте обновления 60 Гц Настраиваемый двухтактный выход или выход с открытым стоком Включение вывода Вывод чтобы быстро отключить все выходы, выполните Инструкции по использованию:
(1) Плата привода, подключенная к Arduino: плата драйвера PWM использует метод I2C, поэтому к устройству Arduino можно подключить только четыре линии: "Классический" режим вывода Arduino: + 5v -> VCC GND -> GND Analog 4 -> SDA Analog 5 -> SCL Старый способ вывода Mega: + 5v -> VCC GND -> GND Digital 20 -> SDA Digital 21 -> SCL R3 и более поздний метод вывода Arduino (Uno, Mega & Leonardo): (Эти платы имеют специальные выводы SDA и SCL) + 5v -> VCC GND -> GND SDA -> SDA SCL -> SCL VCC pin предназначен только для питания микросхемы, если вы хотите подключить сервопривод или светодиодные лампы, используйте V + pin блок питания, V + pin поддерживает источник питания 3,3 ~ 6 В (безопасное для микросхемы напряжение 5 В).Рекомендуется подключать внешний источник питания через клемму источника питания. (2) часть источника питания: Большая часть расчетного напряжения сервопривода составляет 5 ~ 6 В, особенно в нескольких одновременно работающих рулевых механизмах, при этом требуется источник питания высокой мощности.Если вы напрямую используете вывод Arduino 5V для питания сервопривода, могут возникнуть некоторые непредсказуемые проблемы, поэтому мы рекомендуем вам использовать подходящий внешний источник питания для платы привода. (3) Подключите сервопривод: Большинство сервоприводов подключаются с помощью стандартных 3-проводных штекерных разъемов, при условии, что на них имеется соответствующий вывод на плате драйвера. (Провод заземления, как правило, черный или коричневый, сигнальная линия, как правило, желтая или белая) (4) для назначенного адреса платы драйвера: Каждая плата привода каскада должна иметь уникальный адрес доступа.Начальный адрес I2C каждой платы драйвера равен 0 × 40, вы можете изменить верхний правый угол адреса I2C перемычки.Соедините перемычку припоем, чтобы обозначить двоичное число "1".Плата 0: Адрес = 0x40 Смещение = двоичный код 00000 (по умолчанию) Плата 1: Адрес = 0x41 Смещение = двоичный 00001 (как показано выше, подключен к A0) Плата 2: Адрес = 0x42 Смещение = двоичный 00010 (подключение к A1) Плата 3: Адрес = 0x43 Смещение = двоичный 00011 (подключение к A0 и A1) Плата 4: Адрес = 0x44 смещение = двоичный 00100 (подключение к A2) И так далее. . .Пример кода: #включить #включить adafruit_pwmserv-драйвер pwm1 = adafruit_pwmserv-драйвер pwm (0 × 40); adafruit_pwmserv-драйвер pwm2 = adafruit_pwmserv-драйвер pwm (0x41); Аннулировать setup () { Serial.begin (9600); Serial.println ( "проверка 16-канального ШИМ! "); Pwm1.begin (); Pwm1.setPWMFreq (1600); // Это максимальная частота ШИМ Pwm2.begin (); Pwm2.setPWMFreq (1600); // Это максимальная частота ШИМ
| Комплектация | SMD |
| Рассеиваемая мощность | . |
| Номер модели | PCA9685 |
| Напряжение питания | . |
| Тип | модуль сервозащиты |
| Рабочая температура | . |
| Фирменное наименование | Эквалайзер |
| Происхождение | Материковый Китай |
| Применение | модуль сервозащиты |
| Состояние | Новое |